[摘要]近日,轻舟智航全新发布Driven-by-QCraft第三代L4级自动驾驶硬件方案,其中传感器套件结合了多类先进高精度传感器的特点,实现了360度无盲区感知,具备极强的稳定性和实时性。
近日,轻舟智航全新发布Driven-by-QCraft第三代L4级自动驾驶硬件方案,其中传感器套件结合了多类先进高精度传感器的特点,实现了360度无盲区感知,具备极强的稳定性和实时性。同时在传感器、计算平台、电源、通信等模块均采用全冗余设计。
在下一代硬件方案中,轻舟智航还将率先使用NVIDIA DRIVE Orin,让L4级自动驾驶的计算平台迈向量产车规级,这也意味着轻舟智航成为首个使用NVIDIA DRIVE Orin的L4级自动驾驶通用方案公司。
同一方案支撑十款车型、十座城市、多个场景
目前,搭载同一硬件方案的自动驾驶车辆已在美国硅谷、中国北京、深圳、苏州等全球10座城市落地测试和运营,部署车辆型号10款,车队数量将近百台,能够完美应对闹市、暴雨、隧道等多类场景。其中的龙舟ONE首款自动驾驶小巴已成功在苏州、深圳、武汉等六座城市落地常态化运营,成为国内布局城市最多的公开道路自动驾驶小巴。
作为国内Robobus的领跑者,2020年轻舟智航在苏州启动了全国首个常态化运营的5G自动驾驶公交项目。而今年10月,轻舟智航在无锡发布全国首个公开道路5G自动驾驶网约巴士,并宣布将在无锡市核心CBD区域启动3条微循环公交线路常态化运营,为市民日常通勤提供安全、便捷的接驳服务。

轻舟智航龙舟ONE自动驾驶小巴
如此高效迅捷的落地能力离不开自动驾驶技术平台的支撑,基于各项自研技术成果,轻舟智航推出了“Driven-by-QCraft”自动驾驶解决方案,其中包括车载软件和车载硬件两大模块。
本次介绍的车载硬件方案,是将轻舟智航核心软件研发技术在车辆上实现应用的重要载体。轻舟智航拥有车载软件各个技术栈全自研能力,包括感知算法、地图与定位、 决策规划、云端控制等,可保证全面覆盖不同城市场景及不同车型的应用需求。
随着龙舟系列自动驾驶车的规模化落地,车辆将产生海量数据。而能否对这些数据进行自动化收集和使用,是自动驾驶技术实现高效迭代的关键所在。轻舟数据流场便可自动完成PB量级的数据收集、筛选、清洗、标注以及仿真评估、大规模仿真场景生成等各步骤,形成完善的一整套流程。
以安全为红线
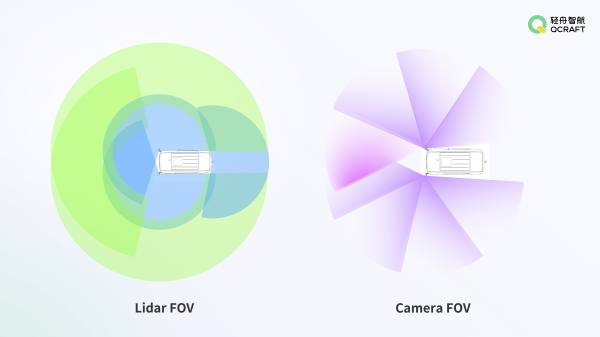
多传感器融合套件:360度无盲区高稳定感知
为更稳定地感知外部道路参与者信息,轻舟智航采用多传感器融合的方式构建传感器系统,达到车身周边360度无盲区感知效果。多传感器融合套件采用了易于部署的模块化设计,包含2个长距离测量激光雷达(主LiDAR)、3个近距离补盲激光雷达(盲区LiDAR)、4个毫米波雷达、9个感知摄像头和1个IMU套装。

Driven-by-QCraft第三代自动驾驶硬件方案多传感器融合套件
360度无盲区感知:传统感知方案容易有盲区,对于高速行驶的乘用车、尺寸较高的巴士而言,盲区会带来潜在危险,轻舟智航在中国首创的360度无盲区感知方案,可以保证自车周围无死角感知且互为冗余,车辆周边盲点距离车辆距离小于10cm。


传感器套件左右互为冗余:不像手机、电视或者家用电脑,自动驾驶汽车一旦出现故障,便是性命攸关的事。为此,轻舟智航建立了“多重保险”,让传感器套件实现左右互为冗余:基于五个激光雷达,当其中单个或两个雷达失效时,自动驾驶系统依然能保证感知模块正常运转,支撑车辆安全停靠。
高同步性的激光雷达方案:套件中每一个激光雷达的旋转方向均在同一时刻保持一致,具备高度同步性。当周围有动态物体出现的时候,点云不会出现错位或重影现象,同时保证可将所有激光雷达的点云数据收集在一起集中处理,最大化利用所有信息。
摄像头智能适应不同环境:通过先进的软件算法,系统可处理在不同光线条件下的过曝或欠曝问题,以及在车辆行驶过程中因运动模糊导致的拖影问题,使得车辆在不同光线以及不同运动状态下都具备稳定的感知能力。独特定制设计的专门识别红绿灯的相机可以不受环境光干扰,能够在晚上精准识别出150米外的红绿灯形状及颜色。此外,摄像头采用车规级设计,满足汽车级特殊环境,工作温度范围可覆盖-40至125℃。

摄像头盲区最小化处理:7颗500万像素的周视相机采用逆时针旋转90度安装形成纵向视图,既保证了相机逐行曝光方向与激光雷达扫描方向的一致性并因此提高了两者的前融合效果,又大大减少了地面盲区。相比传统的安装方式地面盲区面积减少了90%以上,保证了周边近距离物体的识别,检测出车辆近处的交通锥、行人等,尤其是较矮的儿童。
在室外,气温变化引起的温度差以及下雨天气会使镜头凝结水雾导致画面迷糊,而轻舟的传感器自带清洁功能,能自动进行去污处理,去除水雾、灰尘或其他污垢。
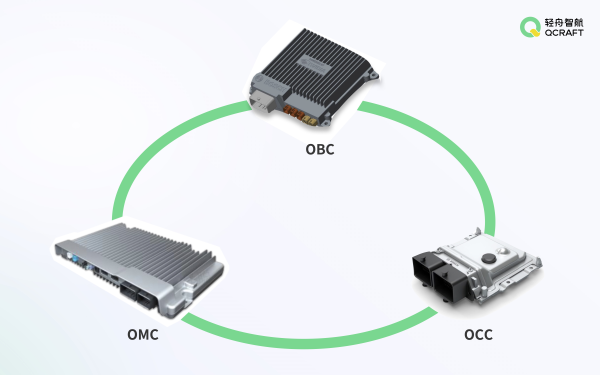
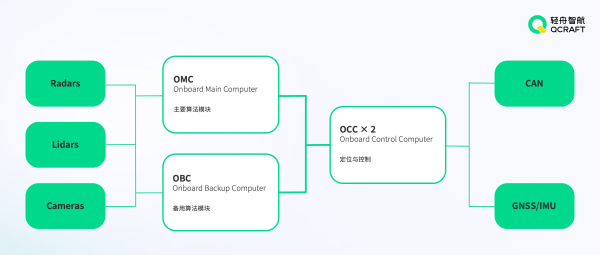
计算平台:三层次互为冗余设计
Driven-by-QCraft的计算平台包括了主计算单元、备份计算单元、车载计算单元三个层次。正常情况下,主计算单元负责自动驾驶系统软件功能的运行、计算,在其因为特殊原因发生故障以后,为了确保车辆系统的安全,备份计算单元接收车辆控制,决定车辆下一步的运动行为,这样的“大小脑”设计让车辆拥有异常情况靠边停车、紧急刹车等保护机制。
(责任编辑:葛良宵)